Development of a Digital and Physical Twin Platform for a Fischertechnik-based Factory
Position INTERNSHIP
Expected start date2026
Estimated duration2-5 months
Education level
ContactDidier Vojtisekdidier.vojtisek@inria.fr
Context
The MBDO project (Model Based DevOps) aims to provide methodologies and tooling to implement digital twins.
Digital twins support various objectives including monitoring, deviation detection, failure detection, simulation, planning, and automatic or assisted reconfiguration.
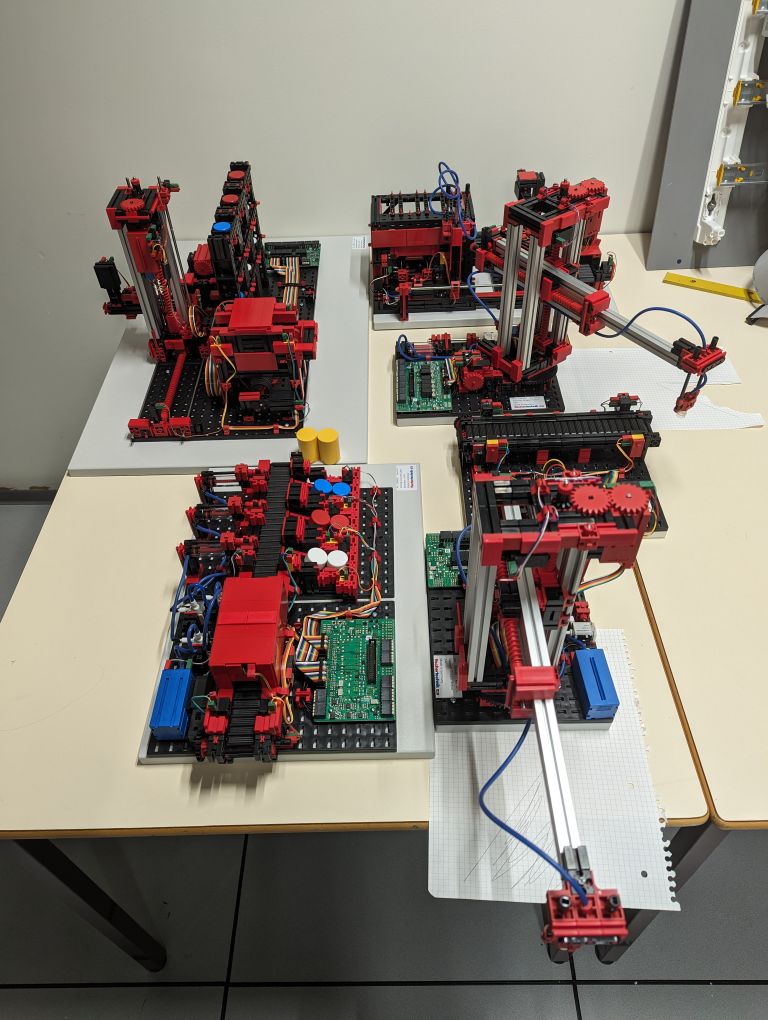
As a digital twin must represent a physical system, the DiverSE team has acquired a set of Fischertechnik modules that act as the physical platform. The modules form a Training Factory composed of Vacuum Gripper Robots, Automated High-Bay Warehouse, Conveyor, Multi-Processing Station, and Sorting Line.
The actuators and sensors of the modules are driven by several Raspberry Pi devices with IO bus support.
The platform is used for research experiments and public demonstrations (e.g., science outreach events such as Fête de la Science).
Objectives
The internship focuses on extending both the digital twin and the physical twin of the platform, and improving their interaction.
The task list will be adapted depending on the internship duration.
Digital Twin
Port existing 3D factory models to the Godot engine (currently partially implemented in Unity).
Adapt and extend 3D models to support interactive simulation.
Design and implement APIs and applications to:
- reproduce the behavior and movements of the physical twin,
- allow direct interaction with the digital twin.
Improve the digital platform for realistic visualization and demonstration purposes.
Physical Twin
- Assist in assembling and integrating newly acquired factory machines into the platform.
- Extend the mission manager with support for conditional actions and more advanced execution logic.
- Implement additional features improving interactions between the physical and digital twins.
Expected Outcome
The work will contribute to a research platform used both for experimentation and for public demonstrations of cyber-physical systems and digital twin technologies.
Candidate Profile
We are looking for a motivated student interested in cyber-physical systems, software engineering, or interactive simulation.
Required skills
- Programming experience (e.g., Java, Python, typescript, or similar).
- Ability to work in a collaborative research environment.
- Experience with Git-based workflows (GitLab, issues, merge requests, version control).
Appreciated skills
- Experience with 3D engines (Godot, Unity, or similar).
- Knowledge of distributed systems, IoT, or embedded systems.
- Experience with web services or API design.
Application
Send an email to Didier Vojtisek.